



TECHNOLOGY & RESEARCH NEWS
Optimum Carrier for UWB Radio: Impulse Radio Versus Chaotic Carrier
Data communications is going to wireless everywhere, from computer keyboard to Internet, from sensor networks to embedded systems. The spread of wireless communications is blocked by the fact that the radio channels have been already assigned to conventional communication systems and except a very few and crowded ISM bands there are no empty channels. Radio communications via channels already occupied by conventional narrowband systems can be achieved by using ultra-wideband (UWB) radio [1], where extremely wideband wavelets are used as carriers in order to reduce the power spectral density (psd) of transmitted signal and, consequently, to keep the interference caused in the narrowband systems low enough. The minimum and typical bandwidths of the transmitted UWB signals are 500 MHz and 2 GHz, respectively, the frequency band assigned for UWB radio goes from 3.1 GHz to 10.6 GHz. In UWB radio, only the psd of radiated signal is limited, the FCC regulation does specify neither the type of carrier nor the modulation scheme.
The UWB radio is a low-data rate system working in the Personal Operating Space (POS, max. 100 m coverage). The UWB devices should operate in an ad-hoch network established without infrastructure and providing self-healing capability. These networking devices will be used in sensor networks, embedded systems, etc., where the average data rate is low. Operation without maintenance is a must and nobody is going to repair the failed devices. The UWB devices should be equipped with location capability. Operation for years is expected using the same battery and the price of one UWB device has to be less than USD 10.00.
These requirements cannot be satisfied by simply improving the performance of conventional radio systems, instead, a brand new approach is required where new carriers, modulation schemes and transceiver architectures are used. To keep the cost low, the UWB networking devices are built with CMOS technology using the System-on-a-Chip (SoC) concept. Both the carrier generation and modulation scheme must support the implementation with CMOS technology. Chaos-communications has been proposed as an alternative solution to conventional communications. Since in chaos-communications there is an inevitable loss in exploitable a priori information [2], its noise performance lags behind that of the conventional coherent systems.
The recovery of UWB carriers is not feasible, consequently, coherent UWB receivers cannot be built. The advantage of conventional communications over the chaotic one is lost in UWB applications. The duration of UWB impulses is very short, the typical value is about 0.5 ns. The generation and reception of such UWB impulses with CMOS circuitry is a very hard task, especially if low price and low power consumption have to be achieved. Chaotic carriers can be generated by simply circuitry, the transmitted reference modulation scheme offers a very simple and robust transceiver configuration. The simple transceiver architecture offers a low price and results in a low power consumption. This article shows that the noise performance of chaotic UWB systems are competitive with that of the UWB impulse radio, while the chaos-based systems offer a simpler and cheaper system configuration.
 Introduction: The digital information to be transmitted is mapped to wideband wavelets of very short duration in UWB radio. The wavelets have a fixed waveform in impulse radio [3] and they are chaotic signals in chaotic UWB radio. Since the recovery of UWB wavelets is not feasible, noncoherent demodulation schemes have to be used: (i) pulse polarity modulation (PPM) using one wavelet and template detection, or (ii) transmitted reference (TR) system using two wavelets and autocorrelation detection.
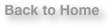
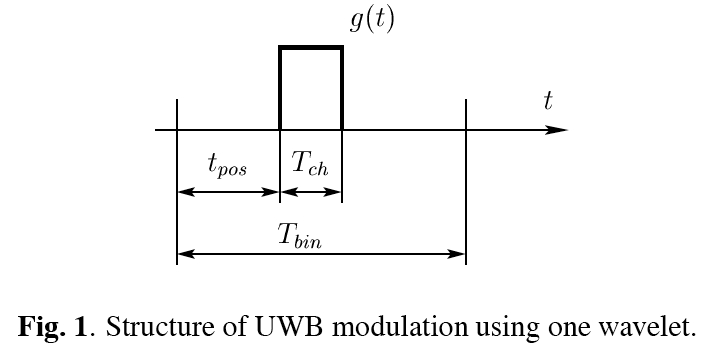
Introduction: The digital information to be transmitted is mapped to wideband wavelets of very short duration in UWB radio. The wavelets have a fixed waveform in impulse radio [3] and they are chaotic signals in chaotic UWB radio. Since the recovery of UWB wavelets is not feasible, noncoherent demodulation schemes have to be used: (i) pulse polarity modulation (PPM) using one wavelet and template detection, or (ii) transmitted reference (TR) system using two wavelets and autocorrelation detection.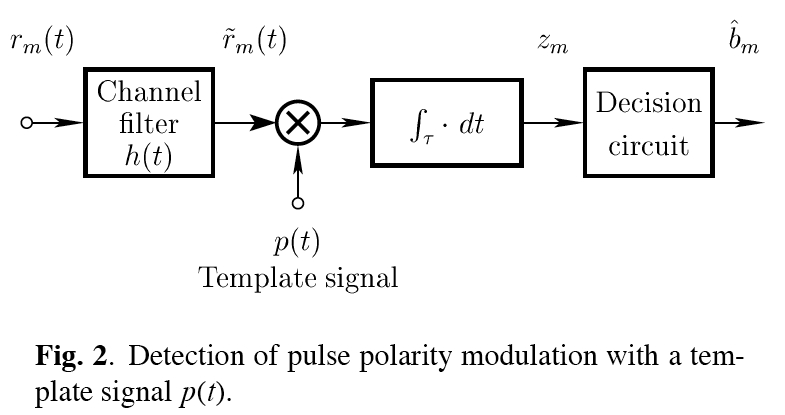 Pulse Polarity Modulation with Template Detection: The structure of UWB modulation using one wavelet is shown in Fig. 1, where g(t) denotes the wavelet having an arbitrary but fixed waveform. Because of its excellent spectral properties, mostly bell-shaped Gaussian impulses are used as g(t) [3]. The time slot in which the impulse g(t) is transmitted is denoted by Tbin and Tch is the impulse duration. The digital information to be transmitted can be mapped into the position tpos, amplitude or polarity of g(t). In PPM [3], used in UWB impulse radio, the binary information is carried by the sign of wavelet. Let the channel noise be denoted by n(t), then rm(t) = g(t) + n(t) and r̃m(t) = g̃(t) + ñ(t) are the received noisy signal before and after channel filtering, respectively. As shown in Fig. 2, the observation signal zm is determined by correlating r̃m(t) with a template signal p(t), finally the decision circuit estimates the transmitted bit stream b̂m. The template signal is a windowing and weighting pulse. Figure 3 shows the filtered received r̃m(t) and template p(t) signals for the ideal case when r̃m(t) and p(t) are in perfect alignment. The perfect alignment is never achieved in a built system. Two kinds of timing error exist: (i) synchronization error and (ii) template matching error. Any timing error reduces the separation of message points in the observation space and, consequently, results in a considerable performance degradation.
Pulse Polarity Modulation with Template Detection: The structure of UWB modulation using one wavelet is shown in Fig. 1, where g(t) denotes the wavelet having an arbitrary but fixed waveform. Because of its excellent spectral properties, mostly bell-shaped Gaussian impulses are used as g(t) [3]. The time slot in which the impulse g(t) is transmitted is denoted by Tbin and Tch is the impulse duration. The digital information to be transmitted can be mapped into the position tpos, amplitude or polarity of g(t). In PPM [3], used in UWB impulse radio, the binary information is carried by the sign of wavelet. Let the channel noise be denoted by n(t), then rm(t) = g(t) + n(t) and r̃m(t) = g̃(t) + ñ(t) are the received noisy signal before and after channel filtering, respectively. As shown in Fig. 2, the observation signal zm is determined by correlating r̃m(t) with a template signal p(t), finally the decision circuit estimates the transmitted bit stream b̂m. The template signal is a windowing and weighting pulse. Figure 3 shows the filtered received r̃m(t) and template p(t) signals for the ideal case when r̃m(t) and p(t) are in perfect alignment. The perfect alignment is never achieved in a built system. Two kinds of timing error exist: (i) synchronization error and (ii) template matching error. Any timing error reduces the separation of message points in the observation space and, consequently, results in a considerable performance degradation. 
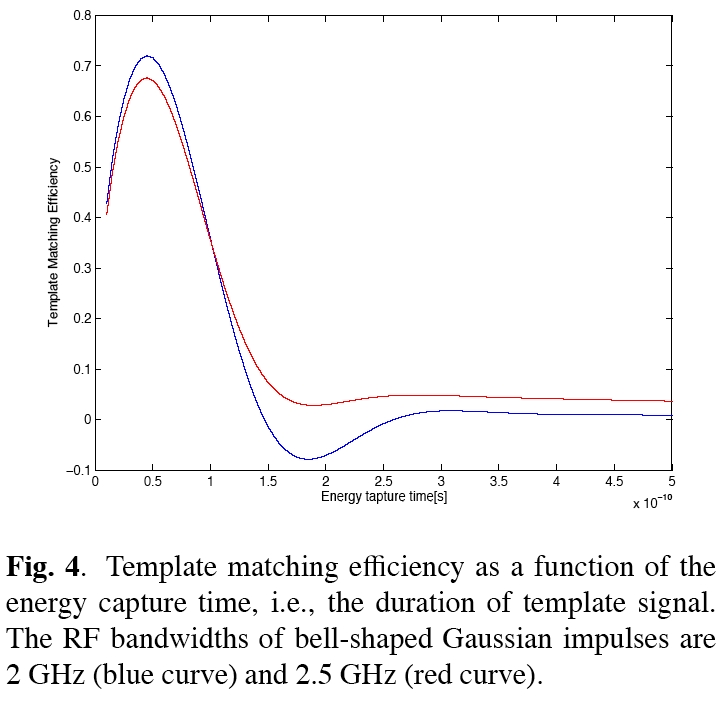 As an example let the effect of template matching error be demonstrated. The template matching efficiency gives how well the energy capture time of receiver, i.e., the duration of template signal is matched to that of transmitted UWB impulse. Figure 4 shows that even in the case of perfect alignment there is a 3-dB implementation loss. Note, for certain template matching errors the observation signal may become even zero,i.e., the demodulation becomes impossible.
As an example let the effect of template matching error be demonstrated. The template matching efficiency gives how well the energy capture time of receiver, i.e., the duration of template signal is matched to that of transmitted UWB impulse. Figure 4 shows that even in the case of perfect alignment there is a 3-dB implementation loss. Note, for certain template matching errors the observation signal may become even zero,i.e., the demodulation becomes impossible.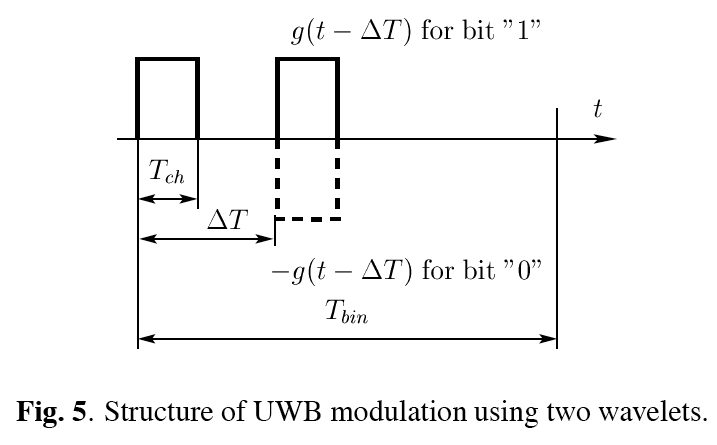 Transmitted Reference: In a TR system, two wavelets, called chips, are used to transmit one bit information. The first chip serves as a reference, while the second one carries the information. The structure of modulated TR signal is shown in Fig. 5, where ∆T is the delay between the two chips and g(t) denotes an arbitrary wavelet that may be either a chaotic signal or a UWB impulse. The best noise performance is achieved by the antipodal modulation scheme where the information bearing chip is the delayed reference chip for bit “1”, and it is equal to the inverted and delayed reference chip for bit “0”. The reference chip may be considered as a test signal used to measure the actual channel characteristics. This solution is very robust, it can be used even in a time-varying channel. Due to the special structure of TR signal, the information bits may be recovered from the sign of correlation measured between the reference and information bearing chips. The block diagram of TR autocorrelation receiver is shown in Fig. 6. In contrast to template detection, a noisy reference chip is correlated with a noisy information bearing one in the TR autocorrelation receiver. This is why its noise performance depends on the product of receiver bandwidth 2B and energy capture time τ. The higher the product of 2Bτ, the worse the Bit Error Ratio (BER).
Transmitted Reference: In a TR system, two wavelets, called chips, are used to transmit one bit information. The first chip serves as a reference, while the second one carries the information. The structure of modulated TR signal is shown in Fig. 5, where ∆T is the delay between the two chips and g(t) denotes an arbitrary wavelet that may be either a chaotic signal or a UWB impulse. The best noise performance is achieved by the antipodal modulation scheme where the information bearing chip is the delayed reference chip for bit “1”, and it is equal to the inverted and delayed reference chip for bit “0”. The reference chip may be considered as a test signal used to measure the actual channel characteristics. This solution is very robust, it can be used even in a time-varying channel. Due to the special structure of TR signal, the information bits may be recovered from the sign of correlation measured between the reference and information bearing chips. The block diagram of TR autocorrelation receiver is shown in Fig. 6. In contrast to template detection, a noisy reference chip is correlated with a noisy information bearing one in the TR autocorrelation receiver. This is why its noise performance depends on the product of receiver bandwidth 2B and energy capture time τ. The higher the product of 2Bτ, the worse the Bit Error Ratio (BER).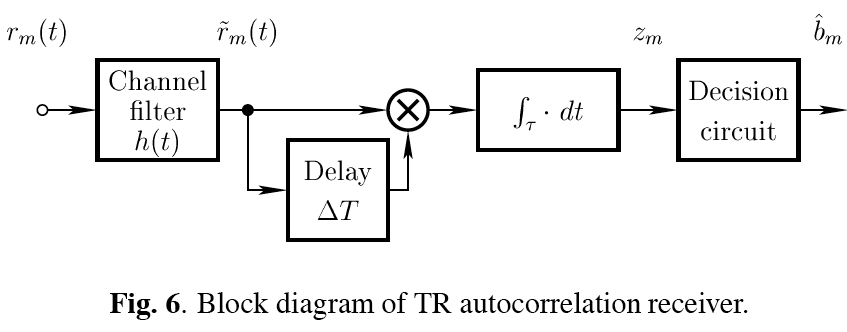
The TR reference chip becomes noisy since it is sent via the radio channel. This noise corrupts the noise performance but, on the other hand, the fact that both the reference and information bearing chips pass through the same radio channel makes the autocorrelation TR system very robust against the channel distortion.
Comparison of the Noise Performances: Let the template matching efficiency, plotted in Fig. 4, be denoted by etm. The noise performance of pulse polarity modulation demodulated with template detection is shown in Fig. 7 for different UWB impulse bandwidths 2B and template matching efficiency etm.
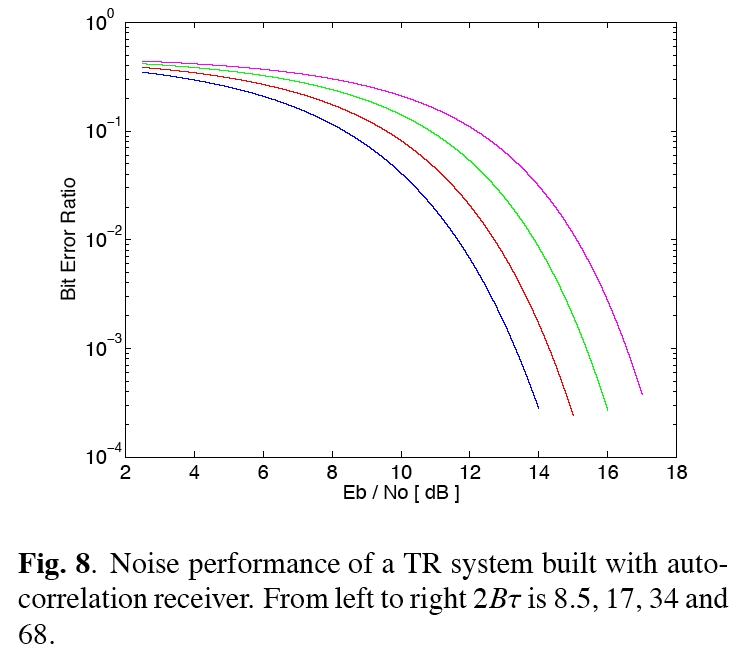
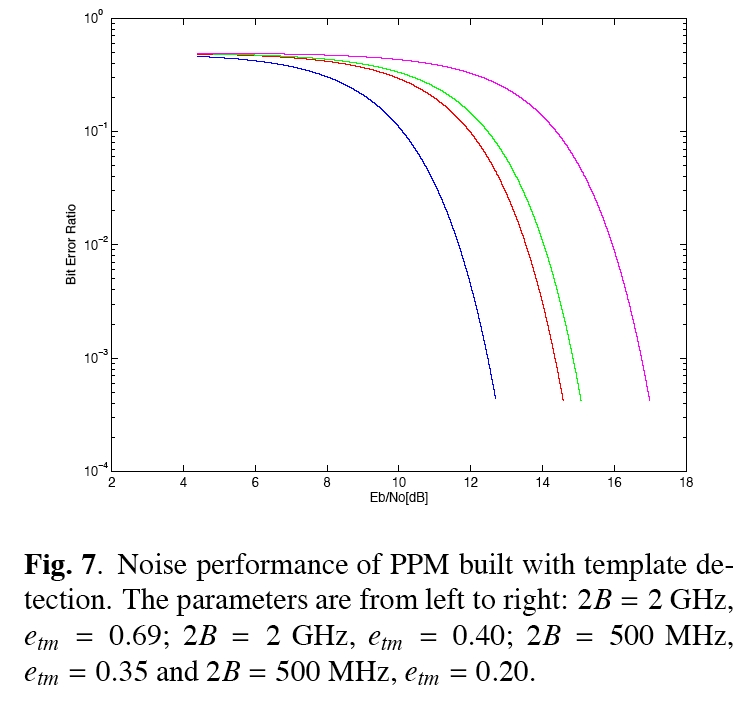 The noise performance of a transmitted reference system built with an autocorrelation receiver is plotted in Fig. 8. The parameter is the product of receiver bandwidth 2B and energy capture time τ. In TR systems the energy capture time is equal to the chip duration Tch. Either a chaotic signal or a UWB impulse may be used as carrier g(t) in a TR system, Fig. 8 is valid for both implementations. Figures 7 and 8 show that there is no a significant difference between the theoretical noise performances of PPM and TR systems in an AWGN channel.
The noise performance of a transmitted reference system built with an autocorrelation receiver is plotted in Fig. 8. The parameter is the product of receiver bandwidth 2B and energy capture time τ. In TR systems the energy capture time is equal to the chip duration Tch. Either a chaotic signal or a UWB impulse may be used as carrier g(t) in a TR system, Fig. 8 is valid for both implementations. Figures 7 and 8 show that there is no a significant difference between the theoretical noise performances of PPM and TR systems in an AWGN channel.Conclusion: The main advantage of template detection is that the template signal is a noise-free signal, consequently, this solution results in a better noise performance if the template is perfectly aligned with the received UWB impulse. However, even a small error in timing corrupts the noise performance seriously. Because the UWB radio operates in the microwave frequency region, it seems to be very hard to fulfill the strict timing requirements using CMOS technology.
FM-DCSK [4], a chaos-based TR modulation scheme, and the TR modulation offer alternative noncoherent UWB modulations. The TR systems may operate with 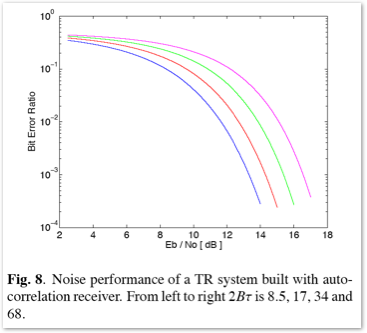 either chaotic or fixed carriers. The TR systems are much less sensitive to the timing error than the PPM using template detection. The detection in TR systems can be implemented with a simple autocorrelation receiver that is very robust against the channel distortion.
either chaotic or fixed carriers. The TR systems are much less sensitive to the timing error than the PPM using template detection. The detection in TR systems can be implemented with a simple autocorrelation receiver that is very robust against the channel distortion.
 either chaotic or fixed carriers. The TR systems are much less sensitive to the timing error than the PPM using template detection. The detection in TR systems can be implemented with a simple autocorrelation receiver that is very robust against the channel distortion.
either chaotic or fixed carriers. The TR systems are much less sensitive to the timing error than the PPM using template detection. The detection in TR systems can be implemented with a simple autocorrelation receiver that is very robust against the channel distortion.References:
[1] J. H. Reed, An Introduction to Ultra Wideband Communication Systems, Prentice Hall, Upper Saddle River, NJ, 2005.
[2] G. Kolumbán, F. C. M. Lau, and C. K. Tse, “Generalization of waveform communications: The Fourier analyzer approach,” Circuits, Systems and Signal Processing, 24(5):451-474, September/October 2005.
[3] K. Siwiak and D. McKeown, Ultra-Wideband Radio Technology, Wiley, Chichester, UK, 2004.
[4] G. Kolumbán, M. P. Kennedy, and G. Kis, “Performance improvement of chaotic communications systems,” In Proc. ECCTD’97, pp. 284-289, Budapest, Hungary, August/September 1997.
Géza Kolumbán and Tamás Krébesz, Department of Measurement and Information Systems, Budapest University of Technology and Economics, Hungary (Email: kolumban@mit.bme.hu)

This article was recommended by Michael Tse.